樂玩lewin起重科技有限公司
Suzhou Outuo Lifting Technology Co., Ltd
Suzhou Outuo Lifting Technology Co., Ltd

如下文章來歷在:呆板人年夜課堂呆板人作為智能制造的使能設備,陪同人工智能、5G、工業互聯、傳感器等技能快速成長,呆板人技能也獲得了又快又好的成長。工業呆板人自20世紀60年月以來,已經廣泛運用在汽車、3C、食物、物流等范疇。其可于高溫、低溫、有毒的卑劣的情況下替換人類完成繁重、枯燥反復的事情,既可以提高事情效率,又可以包管產物質量,極年夜的掩護事情職員安危。
作為工業呆板人的串聯呆板人,因其布局簡樸、操作空間年夜等特色,于諸多范疇獲得了廣泛運用。然而,跟著并聯呆板人沖破了串聯呆板人的自身限定,依附其速率、精度以和剛度的上風,從科研到財產也獲得了較好的成長,作為工業呆板人分支之一,其于食物、藥品、電子、日化等范疇運用不停拓展,使其成為最近幾年來財產界研究與開發的熱門。
咱們特邀阿童木呆板人研發團隊賣力人李艷華師長教師做客呆板人年夜課堂,分享并聯呆板人運動節制技能摸索。
他將從如下幾個方面詳細講述:
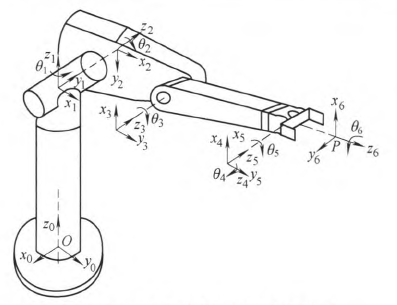
1.串聯呆板人及并聯呆板人
串聯呆板人以開環機構為呆板人機構原型;并聯呆板報酬有一個或者幾個閉合鏈構成的呆板人
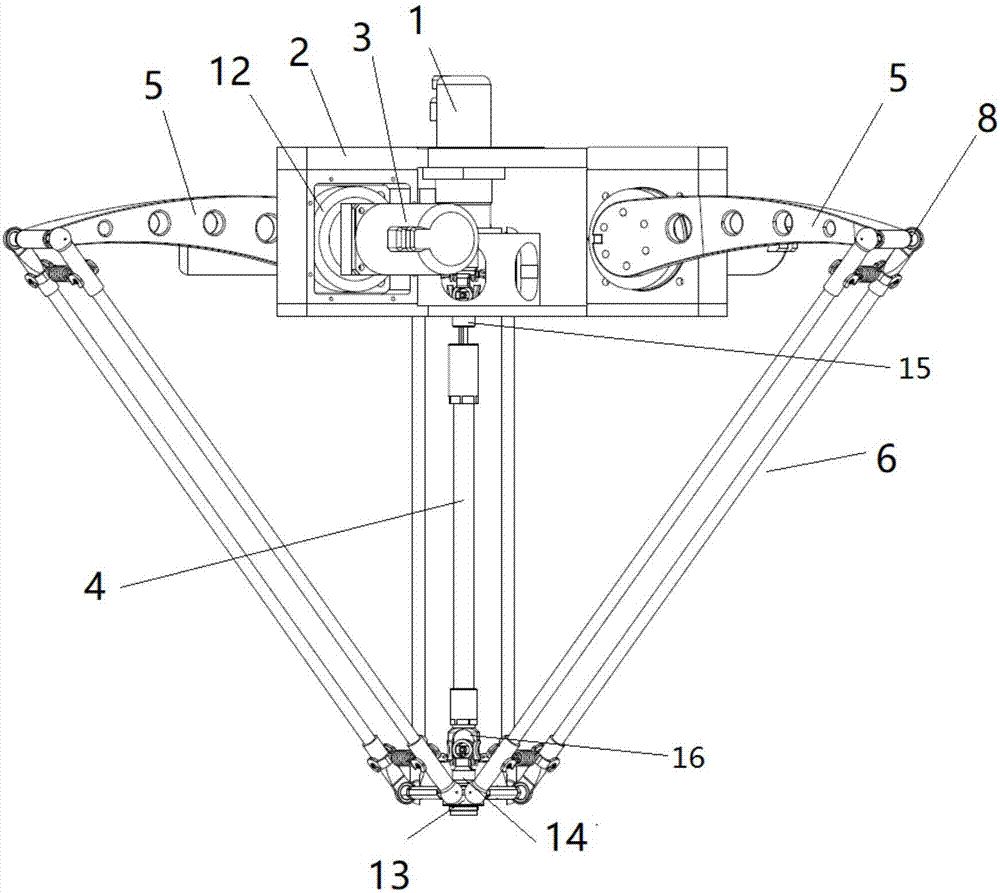
(并聯呆板人)
1)并聯呆板人的結尾上平臺同時由多根連桿支撐,與串聯呆板人比擬,剛度更年夜,并且布局更不變;
2)并聯呆板人的驅動裝配可以安頓于接近機架的位置,防止了呆板人運動歷程中的位置干預干與,減小了體系的慣量,晉升了動力機能;
3)并聯呆板人于設計歷程中常常采用對于稱式的布局,其各項同性好,交換性也較高;
4)串聯式呆板人結尾上存于的偏差是各個樞紐關頭偏差的累積,以是偏差年夜、精度低、而并聯呆板人則沒有串聯式呆板人那樣的偏差累積放年夜瓜葛,精度高、偏差小;
5)并聯呆板人的動力學特征較好,甚至于增年夜尺寸的前提下仍能連結較好的動力學特征;
2.Delta的正逆解解決方案
1)串并聯呆板人的動力學區分:于位置求解上,串聯呆板人的運動學正解輕易,但逆解較堅苦,而并聯呆板人的正解較堅苦,但反解卻很是的輕易。
2)Delta呆板人的求解方式:利用牛頓迭代求正解及利用解析幾何方式求正解。
幾何解法不需要迫近且可直接計較出合理解,推導歷程簡樸。

(位置逆解牛頓迭代法公式)
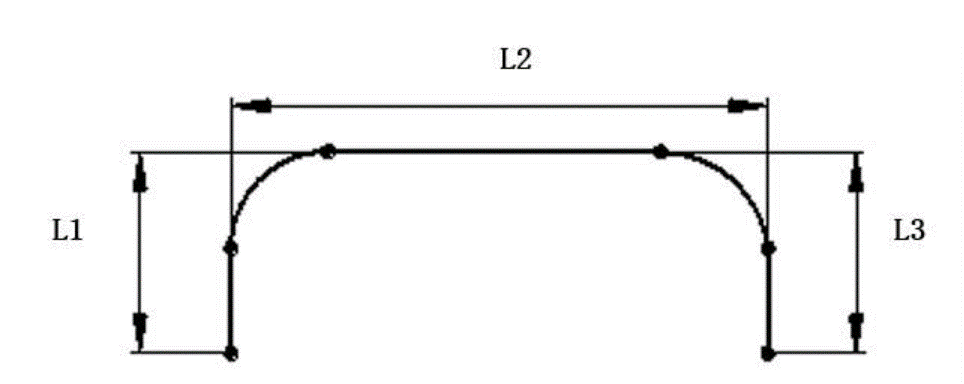
3.并聯呆板人的快速軌跡-疊加與光滑
并聯呆板人相對于串聯呆板來講運行速率更快,要求精度更高。
而于年夜部門運用場景中,并聯的抓取軌跡靠近在門子型軌跡,對于軌跡軌跡的嚴酷復現要求不高,是以于速率計劃的歷程中可以對于加快曲線舉行疊加進而提高機械手的運行速率。
4.線體與圓弧跟蹤-跟蹤場景籠罩
1)線體跟蹤算法
跟蹤實現的方針:一、位置不異 二、速率不異跟蹤算法的實現方式:一、總體跟蹤 二、分部跟蹤 三、數值跟蹤雙跟蹤的實現要領2)圓盤跟蹤算法的孕育發生以和運用
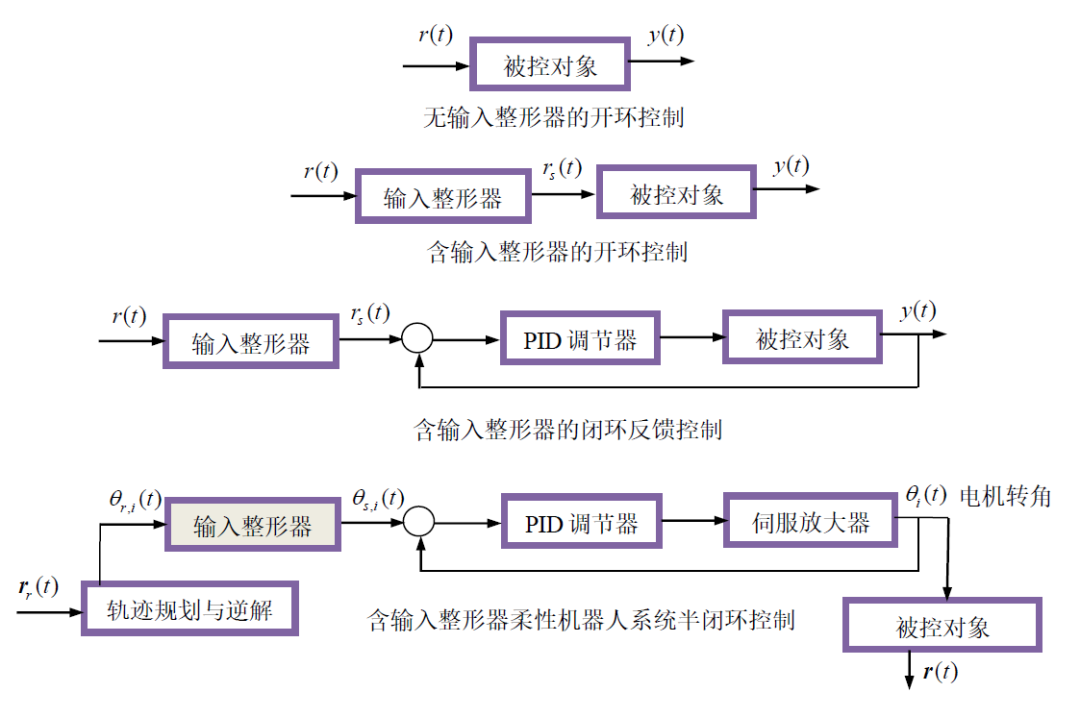
運用場景:物料輪回;占地面積小;事情空間固定等實現方式:實現切向速率跟蹤5.更高的速率要求更高的精度-振動按捺
輸入整形(Input Shaping)是采用零頂點對于消道理有用按捺柔性機械體系點—點殘留振動的一種有用要領,屬開環節制領域。采用輸入整形的長處于在僅需辨認出被控對于象的模態頻率及阻尼比于整個事情區域的變化規模,即可設計出與之匹配的輸入整形器,實現對于殘留振動的有用按捺。

分享佳賓

阿童木呆板人研發團隊賣力人李艷華
分享要點
牛頓迭代&幾何解法
空間軌跡疊加
雙隨動&圓盤追蹤
抑振節制道理
直播信息
主理單元:呆板人年夜課堂、哈工年夜蕪湖呆板人財產技能研究院
直播時間:2020年9月17日(周四)晚19:30
-LEWIN樂玩
